ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в , в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода - полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.

В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий - модулирующий непрерывный сигнал.
Выходные импульсы получаются , частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала - на выходе будет отрицательная часть импульса.

Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал - на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное - когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ - микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.

Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации - это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.

Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, и т. д.

Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.
После того, как мы поморгали светодиодами, разобрались с тактированием и источниками прерываний, пришло время освоить таймер контроллера MSP430G2553.
Таймер – это счетный механизм, привязанный к импульсам сигнала тактового генератора. Таймер Timer_A , является 16-ти битным таймером. Это означает, что он считает от нуля до двоичного 0b1111111111111111, или шестнадцатеричного 0xFFFF, или десятеричного 65535. Таймер является периферийным устройством и так же имеет собственные прерывания.
Таймер Timer_A имеет три режима работы.
Режим непрерывного счёта, в нём таймер просто считает от 0 до 0xFFFF, потом начинает с начала, и так до бесконечности.
Режим прямого счёта, в нём таймер работает так же, считает до верхней границы, и начинает опять с 0. Только в этом режиме вы можете выбирать, верхнюю границу, до которой будет считать таймер.
Режим реверсивного счёта, похож на режим прямого счёта тем, что в нём вы можете выбрать максимальное значение таймера. Отличие его в том, что достигнув максимума, таймер начинает считать вниз, потом, достигнув 0, опять вверх и т.д.
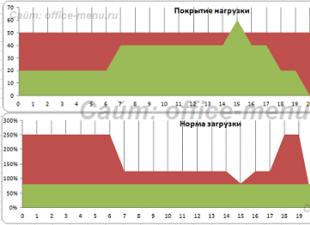
На графиках есть обозначение TACCR0 – это регистр захвата сравнения. Их может быть два (TACCR0 и TACCR1), может быть три (TACCR0, TACCR1 и TACCR2) в зависимости от модели. В этот регистр можно записывать так называемые ключевые точки, по достижению которых таймер будет вызывать прерывание.
Ниже подробно описаны регистры Таймера А
TACTL
– Timer_A Control Register, Регистр управления Таймера А. Используется для связи таймера с тактовыми сигналами и выбора режимов работы.
TASSELx
, биты 8 и 9, указывают таймеру, какой из тактовых сигналов использовать.
IDx
, биты 6 и 7, указывают, какой делитель частоты тактового сигнала использовать, 2, 4 или 8. Делится частота, полученная уже после применения делителя в самом генераторе тактового сигнала.
MCx
, биты 4 и 5, указывают на режим работы таймера. Если они равны 0 (стоит по умолчанию) таймер полностью остановлен.
TACLR
, бит 2. Если в него вписать 1, это приведет к сбросу таймера. Микроконтроллер автоматически вписывает в этот бит 0, после перезапуска таймера.
TAIE и TAIFG
, биты 0 и 1, соответственно. Контролируют прерывание таймера, об этом чуть ниже.
TAR
– Timer_A Register, Регистр счётчика Таймера А, в нём содержится текущее значение таймера.
TACCRx
– Timer_A Capture/Compare Registers, Регистры захвата/сравнения Таймера А. Их может быть два (TACCR0 и TACCR1), может быть три (TACCR0, TACCR1 и TACCR2) в зависимости от модели микроконтроллера. В режиме сравнения, мы вписываем в них значения, по достижении которых, таймер должен подать нам сигнал. TACCR0 зачастую используется для указания верхней границы счёта. В режиме захвата, процессор записывает в них текущее значение TAR, по сигналу на входе.
TACCTLx
– Timer_A Capture/Compare Control Registers, Регистр управления блоком захвата/сравнения Таймера А. От его значения, зависят режимы работы регистров захвата/сравнения.
CMx
, биты 14 и 15, определяют тип сигнала, по которому происходит захват. (По нарастающему, спадающему, обоим фронтам. – Прим. пер.)
CCISx
, биты 12 и 13, выбирают, откуда берется сигнал захвата.
SCS
и SCCI, биты 11 и 10 соответственно, синхронизация сигнала захвата с тактовым сигналом таймера. Обычно, таймер работает независимо, асинхронно, от внешних сигналов. (Я сам до конца не разобрался в этой функции, напишу подробней в следующих уроках)
CAP
, бит 8, выбор режима работы, 1 – режим захвата, 0 – режим сравнения.
OUTMODx
, биты 5-7, выбор режима работы модуля вывода, т.е. тип реакции на событие захвата или сравнения.
CCIE и CCIFG
, биты 4 и 0 соответственно, обработка прерываний по захвату/сравнению.
CCI и OUT
, биты 3 и 2 соответственно, вход и выход захвата/сравнения.
COV
, бит 1, переполнение захвата. Устанавливается в 1, если произошел второй захват, а первый еще не был считан. Должен сбрасываться программно.
TAIV
– Taimer_A Interrupt Vector Register, регистр вектора прерывания Таймера А. Так как прерывание таймера, может быть вызвано по нескольким разным причинам, содержимое этого регистра, указывает на причину вызова прерывания.
TAIVx
, биты 1-3, содержат тип случившегося прерывания, что позволяет нам, совершить разные действия для обработки разных причин прерываний.
Итак, если вам необходимо просто поморгать светодиодом, или переключать реле, или тому подобное, через определённые промежутки времени, то сконфигурировать таймер в таком случае очень просто.
TACCR0 = 62499; // период 62,500 циклов TACCTL0 = CCIE; // Разрешаем прерывание таймера по достижению значения CCR0. TACTL = TASSEL_2 + ID_3 + MC_1 + TACLR; //Настройка режима работы Timer_A: // TASSEL_2 - источник так тов SMCLK (SubMainCLocK), // по умолчанию настроенны х на работу от DCO // ID_3 - делитель частоты на 8, от 1MHz это будет 125kHz // MC_1 - режим прямого счёта (до TACCR0) // TACLR - начальное обнуление таймера
Но давайте немного усложним задачу и сделаем плавное зажигание и затухание светодиода. Для этого нам необходимо применить ШИМ. Принцип ШИМ заключается в подаче напряжения импульсами с фиксированной частотой и переменным коэффициентом заполнения. ШИМ характеризуется таким параметром как коэффициент заполнения — это величина обратная скважности и равна отношению длительности импульса к его периоду.
Чтобы было понятнее, на рисунке ниже приведены сигналы ШИМ для коэффициента заполнения: а – 25%; б – 50 %; в – 75 %; г – 100 %.
t0– время импульса;
T – период;
Изменяя t0, можно получать различные средние значения напряжения на нагрузке, таким образом, изменяя яркость свечения светодиода.
Период широтно-импульсной модуляции должен быть постоянным и больше чем время импульса. Поэтому запишем TACCR0 = 600; // период 600 циклов
. Это число я подобрал экспериментальным путём, чтобы работу таймера было видно невооруженным глазом.
Так как светодиод должен медленно начать светиться, то начальное время импульса должно быть очень маленьким например TACCR1 = 10; // время импульса 10 циклов
. TACCR1 – это второй регистр захвата\сравнения Таймера А. Итак, получается, что при достижении значения TACCR0 = 600 таймер будет генерировать прерывание, в котором мы будем устанавливать выход микроконтроллера в единицу, что будет началом импульса. При это таймер обнуляется и начинает считать заново с нуля пока не дойдёт до TACCR1 = 10, тогда будет сгенерировано прерывание по второму регистру захвата\сравнения, в котором мы установим выход микроконтроллера в ноль. Таким образом длительность импульса t0 будет длиться 5 тактов.
Для того, чтобы светодиод увеличивал интенсивность свечения, необходимо увеличивать время импульса. Для этого после каждого прерывания от TACCR0 будем прибавлять к текущему значению TACCR1 какое-то значение. При этом максимально значения, которое может иметь TACCR1 будет равно периоду, то есть 600. В зависимости о значения, которое мы будем прибавлять, будет зависеть плавность и скорость изменения интенсивности свечения.
TACCR0 = 600; // Период TACCR1 = 5; //Время импульса TACCTL0 = CCIE; // Разрешаем прерывание таймера по достижению CCR0. TACCTL1 = CCIE; // Разрешаем прерывание таймера по достижению CCR1. TACTL = TASSEL_2 + ID_3 + MC_1 + TACLR; //Настройка режима работы Timer_A
Теперь необходимо написать обработчик прерываний для TACCR0 , который будет задавать начало каждому новому периоду, а так же прибавлять или отнимать значение TACCR1, чтобы светодиод плавно зажигался и так же плавно тух.
#pragma vector = TIMER0_A0_VECTOR __interrupt void CCR0_ISR(void) //вектор прерывания для TACCR0, Таймера А { P1OUT |= BIT0; // устанавливаем нулевой бит в еденицу if (TACCR1><=5) // если TACCR1 меньше минимального значения, то увеличиваем TACCR1 { indeX=2; } if (indeX == 1) { --TACCR1; // уменьшаем TACCR1 на 1 } if ((indeX == 2) || (indeX == 0)) { ++TACCR1; // увеличиваем TACCR1 на 1 } }
Прерывание для TACCR1 будет выглядеть следующим образом.
#pragma vector=TIMER0_A1_VECTOR __interrupt void CCR1_ISR(void) //вектор прерывания для TACCR1, Таймера А { P1OUT &= ~BIT0; // устанавливаем нулевой бит порта Р1 в ноль. TAIV &= ~TA0IV_TACCR1; //сбрасываем флаг прерывания. }
Обратите внимание, что в первом случае, в обработчике прерывания от TACCR0 я не сбрасывал флаг прерывания, а для TACCR1 сделал это. Все потому, что флаг прерывания для TACCR0 сбрасывается автоматически при вызове такого прерывания, а для TACCR1 его нужно сбрасывать вручную.
Теперь можно составить полный текст программы.
#include
Итак, прошиваем контроллер, запускаем программку и видим, что красный светодиод медленно зажигается и гаснет, зажигается и гаснет.
Данную программку очень удобно применить на практике. Допустим вам необходимо менять яркость свечения диодного светильника или скорость вращения двигателя постоянного тока, все эти вещи прекрасно реализуются с помощью ШИМ, управлять которой можно с помощью таймера, имеющегося в контроллере MSP430G2553. На нашем сайте обязательно появится цикл статей по управлению двигателем постоянного тока с помощью ШИМ, где мы и применим данные навыки на практике.
Таймеры ШИМ (Лекция)
Очевидно, что нужен какой-то внешний счетчик, который тикал бы независимо от работы процессора, а процессор мог в любой момент посмотреть, что в нем такое натикало. Либо чтобы счетчик выдавал события по переполнению или опустошению – флаг поднимал или прерывание генерировал. А процессор это увидит и обработает. И такой счетчик есть, даже не один – это периферийные таймеры. В AVR их может быть несколько штук с разной разрядностью. В ATmega16 три, в ATmega128 четыре. Причем таймер может быть не просто счетчиком, таймер является одним из самых многофункциональных (в плане альтернативных функций) периферийных устройств.
Что умеют таймеры
· Работать от внешнего кварца на 32768 Гц
· Генерировать несколько видов ШИМ сигнала
· Выдавать прерывания (по полудесятку разных событий) и устанавливать флаги
Источник тиков таймера
Таймер/Счетчик (далее ТС) считает либо тактовые импульсы от встроенного тактового генератора, либо со счетного входа. При соответствующей настройке ТС будет считать либо передний (перепад с 0-1), либо задний (перепад 1-0) фронт импульсов, пришедших на входы. Главное, чтобы частота входящих импульсов не превышала тактовую частоту процессора, иначе он не успеет обработать импульсы.
Кроме того, некоторые таймеры способны работать в асинхронном режиме. То есть ТС считает не тактовые импульсы процессора, а импульсы своего собственного генератора, работающего от отдельного кварца. Для этого у ТС есть отдельные входы, на которые можно повесить кварцевый резонатор. Зачем это надо? Хотя бы для того, чтобы организовать часы реального времени. Повесил на них часовой кварц на 32768 Гц и можно засекать время - за секунду произойдет 128 переполнений (если ТС – восьмиразрядный). Так что одно переполнение это 1/128 секунды. Причем на время обработки прерывания по переполнению таймер не останавливается, он также продолжает считать.
Предделитель
Если таймер считает импульсы от тактового генератора или от своего внутреннего, то их еще можно пропустить через предделитель. То есть еще до попадания в счетный регистр частота импульсов будет делиться. Делить можно на 8, 32, 64, 128, 256, 1024. Так что если повесить на ТС часовой кварц и пропустить через предделитель на 128, то таймер будет считать со скоростью один раз в секунду. Также удобно использовать предделитель, когда надо просто получить большой интервал, а единственный источник счета –это тактовый генератор процессора, а считать эти мегагерцы сложно, а вот если пропустить через предделитель, то все уже проще. Однако если запустить ТС с предделителем, то первый тик на счетный регистр придет не обязательно через необходимое количество импульсов.
Это зависит от того, в каком состоянии находился предделитель, а вдруг он к моменту включения уже досчитал почти до заданного значения? Значит, тик будет сразу же. Предделитель работает все время, вне зависимости от того включен таймер или нет. Поэтому предделители можно и нужно сбрасывать. Также надо учитывать и то, что предделитель един для всех счетчиков, поэтому, сбрасывая его, надо учитывать то, что у другого таймера собьется задержка до следующего тика.
Например, первый таймер работает на выводе 1:64, а второй на выводе 1:1024 предделителя. У второго почти дотикало в предделителе до 1024 и вот вот должен быть тик таймера, но тут ты взял и сбросил предделитель, чтобы запустить первый таймер точно с нуля. Что произойдет? У второго делитель тут же скинется в 0 (предделитель единый, регистр у него один), и второму таймеру придется ждать еще 1024 такта, чтобы получить таки импульс! А если сбрасывать предделитель в цикле, во благо первого таймера, чаще, чем раз в 1024 такта, то второй таймер так никогда и не тикнет. Для сброса предделителей достаточно записать бит PSR10 в регистре SFIOR. Бит PSR10 будет сброшен автоматически на следующем такте.
Счетный регистр
Весь счет накапливается в счетном регистре TCNTх, где вместо х номер таймера. Он может быть как 8-, так и 16-разрядным, в таком случае он состоит из двух регистров TCNTxH и TCNTxL – старший и младший байты соответственно.
Причем тут есть подвох. А дело все в чем – таймер считает независимо от процессора, поэтому мы можем положить вначале один байт, он начнет считаться, потом второй, и начнется пересчет уже с учетом второго байта. Таймер точное устройство, поэтому грузить его счетные регистры надо одновременно! Но как? А инженеры из Atmel решили проблему просто: Запись в старший регистр (TCNTxH) ведется вначале в регистр TEMP. Этот регистр чисто служебный, и нам никак недоступен.
Что в итоге получается? Записываем старший байт в регистр TEMP (для нас все равно TCNTxH), а затем записываем младший байт. В этот момент в реальный TCNTxH заносится ранее записанное значение. То есть два байта, старший и младший, записываются одновременно! Менять порядок нельзя! Выглядит это так:
Зачем запрещать прерывания? Да чтобы после записи первого байта, программа случайно не ушла не прерывание.
Читается все также, только в обратном порядке. Сначала младший байт (при этом старший – в TEMP), потом старший. Это гарантирует то, что мы считаем именно тот байт, который был на данный момент в счетном регистре.
Контрольные регистры
Основная функция таймера - счетная. Главным регистром является TCCRx. Для ТС0 – это TCCR0, для других таймеров TCCR n соответственно. Первые 3 бита этого регистра: CSx2..CSx0 отвечают за установку предделителя и источник тактового сигнала, вместо х подставляется номер таймера. У разных таймеров немного по-разному, поэтому опишем биты CS02…CS00 только для таймера0.
· 000 - таймер остановлен
· 001 - предделитель равен 1, то есть выключен. Таймер считает тактовые импульсы
· 010 - предделитель равен 8, тактовая частота делится на 8
· 011 - предделитель равен 64, тактовая частота делится на 64
· 100 - предделитель равен 256, тактовая частота делится на 256
· 101 - предделитель равен 1024, тактовая частота делится на 1024
· 110 - тактовые импульсы идут от ножки Т0 на переходе с 1 на 0
· 111 - тактовые импульсы идут от ножки Т0 на переходе с 0 на 1
Прерывания
У каждого аппаратного события есть прерывание, и таймер не исключение. Как только происходит переполнение или другое событие, так сразу же генерируется прерывание. За прерывания от таймеров отвечают регистры TIMSК, TIFR. А у мощных AVR, таких как ATMega128, есть еще ETIFR и ETIMSK - своего рода продолжение, так как таймеров там больше.TIMSK – это регистр масок. То есть биты, находящиеся в нем, локально разрешают прерывания. Если бит установлен, значит, конкретное прерывание разрешено. Если бит в нуле, значит, данное прерывание не обрабатывается. По умолчанию все биты в нуле. За прерывание по переполнению отвечают биты:
· TOIE - разрешение на прерывание по переполнению таймера 0
· TOIE1 - разрешение на прерывание по переполнению таймера 1
· TOIE2 - разрешение на прерывание по переполнению таймера 2
Регистр TIFR это непосредственно флаговый регистр. Когда какое то прерывание срабатывает, то флаг прерывания устанавливается. Этот флаг сбрасывается аппаратно, когда программа уходит по вектору. Если прерывания запрещены, то флаг так и будет стоять до тех пор, пока прерывания не разрешат и программа не уйдет на прерывание. Чтобы этого не произошло, флаг можно сбросить вручную. Для этого в TIFR в него нужно записать 1!
Подробнее о таймера A T MEGA128 будет рассказано позже.
Широтно Импульсная Модуляция
Широтно-Импульсная Модуляция ( PWM - Pulse Width Modulation ) это способ задания аналогового сигнала цифровым методом , то есть из цифрового выхода, дающего только нули и единицы получить какие-то плавно меняющиеся величины. А суть в чем:
Представь себе тяжеленный маховик, который ты можешь вращать двигателем. Причем двигатель ты можешь либо включить, либо выключить. Если включить его постоянно, то маховик раскрутится до максимального значения, и так и будет крутиться. Если выключить, то остановится за счет сил трения. А вот если двигатель включать на десять секунд каждую минуту, то маховик раскрутится, но далеко не на полную скорость - большая инерция сгладит рывки от включающегося двигателя, а сопротивление от трения не даст ему крутиться бесконечно долго. Чем больше продолжительность включения двигателя в минуту, тем быстрей будет крутиться маховик.
При ШИМ мы подаем на выход сигнал, состоящий из высоких и низких уровней (применимо к нашей аналогии – включаем и выключаем двигатель), то есть нулей и единицы. А затем это все пропускается через интегрирующую цепочку (в аналогии – маховик). В результате интегрирования на выходе будет величина напряжения, равная площади под импульсами. Меняя скважность (отношение длительности периода к длительности импульса) можно плавно менять эту площадь, а значит и напряжение на выходе. Таким образом, если на выходе сплошные 1, то на выходе будет напряжение высокого уровня (например, 12 вольт), если нули, то ноль. А если 50% времени будет высокий уровень, а 50% низкий то 6 вольт. Интегрирующей цепочкой тут будет служить масса якоря двигателя, обладающего довольно большой инерцией.


А что будет, если взять и дать ШИМ - сигнал не от нуля до максимума, а от минуса до плюса. Скажем от +12 до -12. А можно задавать переменный сигнал! Когда на входе ноль, то на выходе -12В, когда один, то +12В. Если скважность 50% то на выходе 0В. Если скважность менять по синусоидальному закону от максимума к минимуму, то получим переменное напряжение. А если взять три таких ШИМ генератора и гнать через них синусоиды, сдвинутые на 120 градусов между собой, то получим самое обычное трехфазное напряжение, а значит привет бесколлекторные асинхронные и синхронные двигатели . На этом принципе построены все современные промышленные приводы переменного тока. В качестве сглаживающей интегрирующей цепи в ШИМ может быть применена RC цепочка:

Аппаратная реализация ШИМ
В случае ATMega проще всего сделать на его ШИМ-генераторе, который встроен в таймеры. Причем в первом таймере есть два канала. Так что ATmega может реализовать одновременно четыре канала ШИМ .
У таймера есть особый регистр сравнения OCR . Когда значение в счётном регистре таймера достигает значения находящегося в регистре сравнения, то могут возникнуть следующие аппаратные события:
· Прерывание по совпадению
· Изменение состояния внешнего выхода сравнения OC .
Выходы
сравнения выведены наружу, на выводы микроконтроллера. Предположим, что ШИМ
-
генератор
настроен так
, что когда значение в счетном
регистре больше
,
чем в регистре сравнения, то на выходе 1, а когда меньше, то 0. Что при этом
произойдет? Таймер будет считать, как ему и положено, от нуля до 256 с частотой
,
которую мы настроим битами
предделителя таймера. После переполнения сбрасывается в 0 и продолжает считать заново.

На выходе появляются импульсы. Если увеличить значение в регистре сравнения, то ширина импульсов станет уже. То есть, меняя значение в регистре сравнения , можно менять скважность ШИМ - сигнала. А если пропустить этот ШИМ-сигнал через сглаживающую RC цепочку (интегратор) , то получим аналоговый сигнал.
У таймера может быть сколько угодно регистров сравнения. Зависит от модели МК и типа таймера. В новых AVR бывает и по три регистра сравнения на таймер, что позволяет одним МК организовать множество независимых ШИМ каналов. Самих режимов ШИМ существует несколько:
Б ы страя ШИМ ( Fast PWM)
В этом режиме счетчик считает от нуля до 255 , после достижения переполнения сбрасывается в нуль и счет начинается снова. Когда значение в счетчике достигает значения регистра сравнения, то соответствующий ему вывод ОСхх сбрасывается в ноль. При обнулении счетчика этот вывод устанавливается в 1.
Частота получившегося ШИМ сигнала определяется просто: Частота процессора, например, 8Мгц, таймер тикает до 256 с тактовой частотой. Значит, один период ШИМ будет равен 8000 000/256 = 31250Гц. Быстрей не получится - это максимальная скорость на внутреннем 8Мгц тактовом генераторе. Еще есть возможность повысить разрешение, сделав счет 8, 9, 10 разрядным (если разрядность таймера позволяет), но надо учитывать, что повышение разрядности, вместе с повышением дискретности выходного аналогового сигнала, резко снижает частоту ШИМ.
ШИМ с фазовой коррекцией (Phase Correct PWM)
ШИМ с точной фазой. Работает похоже, но тут счетчик считает несколько по-другому. Сначала от 0 до 255, потом от 255 до 0. Вывод OCxx при первом совпадении сбрасывается, при втором устанавливается. Но частота ШИМ при этом падает вдвое, из-за большего периода. Основное его предназначение, делать многофазные ШИМ сигналы, например, трехфазную синусоиду. Т.е. центры импульсов в разных каналах и на разной скважности будут совпадать.

Рис. Режим быстрой ШИМ и ШИМ с фазовой коррекцией
Чтобы не было лишних импульсов, в регистр сравнения любое значение попадает через буферный регистр и заносится только тогда, когда значение в счетчике достигнет максимума. Т.е. к началу нового периода ШИМ- импульса.
Сброс по совпадению (Clear Timer On Compare)
Сброс при сравнении. Это уже скорей ЧИМ - частотно-импульсно моделированный сигнал. Тут работает несколько иначе, чем при других режимах. Тут счетный таймер тикает не от 0 до предела, а от 0 до регистра сравнения! А после чего сбрасывается.
В результате, на выходе получаются импульсы всегда одинаковой скважности, но разной частоты. А чаще всего этот режим применяется, когда надо таймером отсчитывать периоды (и генерировать прерывание) с заданной точностью.

Например, надо нам прерывание каждую миллисекунду. И чтобы вот точно. Как это реализовать проще? Через Режим СТС! Пусть частота равна 8Мгц. Предделитель будет равен 64, таким образом, частота счета таймера составит 125000 Гц. А нам надо прерывание с частотой 1000Гц. Поэтому настраиваем прерывание по совпадению с числом 125. Дошел счет до 125 – выработалось прерывание, обнулился счетчик. Дошел до 125 – дал прерывание, обнулился.
8-разрядный таймер-счетчик 0 с функциями ШИМ и асинхронного тактирования
Таймер-счетчик 0 - модуль многофункционального одноканального 8-разрядного таймера-счетчика с аппаратным выходом для генерации ШИМ-сигнала и встроенным асинхронным опциональным тактовым генератором, который оптимизирован под использование часового кварца (32768Гц) для асинхронного по отношению к системной синхронизации тактирования.

Регистры
Регистр таймера-счетчика (TCNT0) и регистр порога сравнения (OCR0) - 8-разр. регистры. Сигналы запроса на прерывание представлены как флаги прерываний таймера в регистре TIFR. Все прерывания индивидуально маскируются с помощью регистра маски прерываний таймеров (TIMSK). Таймер-счетчик может тактироваться через предделитель внутренне или асинхронно через внешние выводы TOSC1/2. Асинхронная работа управляется регистром ASSR. Блок синхронизации осуществляет выбор, какой тактовый источник используется. Если источник тактирования не задан, то таймер-счетчик находится в неактивном состоянии. Выход clkT0 – это выход логики выбора синхронизации. Значение регистра порога сравнения с двойной буферизацией (OCR0) непрерывно сравнивается со значением таймера-счетчика. Результат сравнения может использоваться для генерации сигналов с ШИМ или прямоугольных импульсов переменной частоты на выводе OC0. Совпадение порога сравнения со значением таймера-счетчика приводит к установке флага результата сравнения (OCF0), который может использоваться для генерации запроса на прерывание по результату сравнения.
|
НП (нижний предел) |
Счетчик достигает нулевого значения (0х00) |
|
МАКС (макс. значение) |
Счетчик достигает максимального значения 0xFF (десятич. 255) |
|
ВП (верхний предел) |
Счетчик достигает верхнего предела счета (вершина счета). В качестве вершины счета может выступать фиксированное значение 0xFF или содержимое регистра OCR0. |
Тактовые источники таймера-счетчика 0
ТС0 может тактироваться внутренне синхронно или внешне асинхронно (по отношению к внутренней системной синхронизации). По умолчанию используется clkT0, эквивалентный clkI/O. Если в бит AS0 регистра ASSR записать «1», то в качестве источника выступает генератор на выводах TOSC1 и TOSC2.
Блок счетчика
Основу ТС0 составляет программируемый двунаправленный счетчик.

Описание сигналов (внутренние сигналы):
– Счет - Инкрементирует или декрементирует TCNT0 на 1.
– Направление - Задает направление счета: (+1, прямой счет) или (-1, обратный счет).
– Сброс - Сбрасывает содержимое TCNT0 (запись 0 во все разряды).
– clkT0 - Синхронизация таймера-счетчика.
– Верхний предел - Задает максимальное значение на TCNT0.
– Нижний предел - Задает минимальное значение на TCNT0 (0) .
В зависимости от выбранного режима работы счетчик сбрасывается, инкрементируется или декрементируется на каждом такте clkT0. Тактовый сигнал clkT0 может быть внутренним или внешним, а его частота выбирается с помощью бит CS02-CS00. Если источник синхронизации не задан (CS02-CS00=0b000), то таймер останавливается. Состояние TCNT0 доступно ЦПУ независимо от того синхронизации. Последовательность счета определяется установкой бит WGM01 и WGM00 из регистра TCCR0. Имеется точная связь между поведением счетчика и генерируемой на выходе OC0 формы сигнала. Флаг переполнения ТС (TOV0) устанавливается в соответствии с режимом работы, который выбирается битами WGM01, WGM00. Бит TOV0 может использоваться для генерации прерывания ЦПУ.
Блок сравнения
8-разрядный цифровой компаратор непрерывно выполняет сравнение содержимого регистра таймера-счетчика TCNT0 с регистром порога сравнения OCR0. Всякий раз, когда значение TCNT0 совпадает со значением OCR0, компаратор устанавливает флаг совпадения OCF0 следующим тактом синхронизации таймера. Если разрешено прерывание битом OCIE0=1, то установка флага совпадения вызывает запрос на прерывание. Флаг OCF0 автоматически сбрасывается во время обработки прерывания. Генератор сигнала использует сигнал результата сравнения для генерации прямоугольных импульсов по одному из алгоритмов, который выбирается битами задания режима работы таймера WGM01, WGM00 и битами задания режима формирования выходного сигнала (COM01, COM00). Верхний и нижний пределы счета используются в некоторых режимах работы для выполнения специальных действий.

Регистр OCR0 выполнен по схеме двойной буферизации при использовании режимов с широтно-импульсной модуляцией (ШИМ). В нормальном режиме и режиме сброса таймера при совпадении (CTC) схема двойной буферизации отключается. Двойная буферизация позволяет синхронизировать обновление регистра сравнения OCR0 по достижении верхнего или нижнего предела счета. Такая синхронизация предотвращает возможность возникновения несимметричных ШИМ-импульсов нечетной длины, тем самым гарантируя отсутствие сбоев при генерации прямоугольных импульсов. Доступ к регистру OCR0 может показаться сложным, но это выполнено не случайно. После разрешения двойной буферизации ЦПУ осуществляет доступ к буферному регистру OCR0, а после отключения - непосредственно адресуется к регистру OCR0.
Принудительная установка результата сравнения
В режимах генерации импульсов без ШИМ в формирователе импульсов результат сравнения может быть установлен непосредственно через бит FOC0. Принудительная установка результата сравнения компаратора не приводит к установке флага OCF0 или сбросу/перезагрузке таймера, но влияет на состояние вывода OC0, который будет устанавливаться, сбрасываться или переключаться (инвертироваться) в зависимости от выбранной установки бит COM01, COM00. Данная функция позволяет установить в регистре OCR0 то же значение, что и в TCNT0 без генерации запроса на прерывание, если разрешено тактирование таймера-счетчика.
Использование блока сравнения
Поскольку запись в TCNT0 блокирует любые действия по результату сравнения на один такт синхронизации таймера независимо от режима работы, то при изменении TCNT0 при использовании канала сравнения (независимо работает синхронизация таймера или нет) необходимо учесть следующие особенности. Если в регистр TCNT0 записано значение равное OCR0, то игнорирование совпадения приведет к генерации некорректной формы сигнала. По аналогии следует избегать записи в TCNT0 значения равного нижнему пределу (0x00), если счетчик работает как вычитающий. Установка OC0 должна быть выполнена перед настройкой линии ввода-вывода на вывод в регистре направления.
Блок формирования выходного сигнала
Биты задания режима формирования выходного сигнала (COM01:0) имеют двойное назначение. С одной стороны биты COM01, COM00 используются формирователем сигнала и определяют какое логическое состояние должно быть на выходе OC0 при возникновении следующего совпадения. С другой стороны, биты COM01, COM00 используются для разрешения/запрета альтернативной функции вывода порта OC0. На рисунке представлена упрощенная логическая схема, на которую воздействуют биты COM01, COM00. П оказаны только те регистры управления портом ввода-вывода (DDR и PORT), на которые оказывает действие биты COM01, COM00.

Функция линии универсального порта ввода-вывода заменяется на функцию выхода формирователя сигнала OC0, если хотя бы один из бит COM01, COM00 равен 1. Однако, управлением направлением вывода OC0 (вход или выход) в этом случае остается за соответствующим битом регистра направления данных порта В (DDRB.4). Чтобы значение регистра OC0 присутствовало на выводе OC0 необходимо настроить данную линию на вывод (установить бит DDRB.4). Управление вводом альтернативной функции не зависит от режима генерации сигнала.
Режимы работы таймера-счетчика 0
Режим работы таймера, в т.ч. поведение таймера-счетчика и связанного с ним выхода формирователя сигнала, задается комбинацией бит, задающих режим работы таймера (WGM01, WGM00) и режим формирования выходного сигнала (COM01, COM00). При этом биты задания режима формирования выходного сигнала не влияют на алгоритм счета, т.к. алгоритм счета зависит только от состояния бит задания режима работа таймера. В режимах с ШИМ биты COM01, COM00 позволяют включить/отключить инверсию на генерируемом ШИМ-выходе (т.е. выбрать ШИМ с инверсией или ШИМ без инверсии). Для режимов без ШИМ биты COM01:0 определяют, какое действие необходимо выполнить при выполнении условия сравнения: сбросить, установить или инвертировать выход.
Режимы работы таймера были описаны выше (нормальный (счетный), сброс по совпадению, быстрая ШИМ и ШИМ с фазовой коррекцией).
Асинхронная работа таймера-счетчика 0
Если таймер-счетчик 0 работает асинхронно, то необходимо учесть некоторые особенности. При переключении между асинхронным и синхронным тактовыми источниками таймера-счетчика содержимое регистров TCNT0, OCR0 и TCCR0 может быть нарушено. Во избежание этого необходимо придерживаться следующей безопасной последовательности переключения:
1. Отключить прерывания таймера-счетчика 0 путем сброса бит OCIE0 и TOIE0.
2. Выбрать необходимый тактовый источник с помощью бита AS0
3. Выполнить запись новых значений в TCNT0, OCR0 и TCCR0.
4. При переходе в асинхронный режим тактирования дождаться сброса флагов TCN0UB, OCR0UB и TCR0UB.
5. Сбросить флаги прерывания таймера-счетчика 0
6. При необходимости разрешить прерывания
Генератор оптимизирован под использование часового кварцевого резонатора на частоту 32768 Гц. Тактовая частота ЦПУ должна быть минимум в четыре раза выше частоты генератора. Запись в TCNT0, OCR0 или TCCR0 происходит за два положительных фронта TOSC1, т.к. данные предварительно помещаются во временный регистр, а затем передаются по назначению. Каждый из трех упомянутых регистров имеют свои индивидуальные временные регистры. Это означает, что, например, запись в TCNT0 не влияет на процесс записи в регистр OCR0. Чтобы определить, в какой регистр была выполнена запись, реализован регистр асинхронного состояния ASSR.
Если выбрана асинхронная работа, то генератор на 32768 Гц находится постоянно включенным, за исключением режима выключения и дежурного режима МК.
Предделитель таймера-счетчика 0

Тактовый источник ТС0 обозначен как clkT0. По умолчанию clkT0 подключен к clkI/O. Если бит AS0=1 в регистре ASSR, то ТС0 тактируется асинхронно с вывода TOSC1. Так можно использовать ТС0 в качестве часов реального времени (RTC). Если AS=1, то выводы TOSC1 и TOSC2 не выполняют функции порта С, а между ними может быть подключен кварцевый резонатор в качестве отдельного тактового источника. Подключение к выводу TOSC1 внешнего тактового источника не рекомендуется. Предделитель позволяет выбрать следующие тактовые сигналы: clkT0S/8, clkT0S/32, clkT0S/64, clkT0S/128, clkT0S/256 и clkT0S/1024. Есть возможность остановить синхронизацию. Если PSR0=1 в регистре SFIOR, сбрасывает предделитель.
Описание регистров 8-разрядного таймера-счетчика 0 смотрите в спецификации.
ШИМ (PWM) — широтно-импульсная модуляция. Не нужно пугаться данного термина. Это всего навсего способ регулирования напряжения. Допустим подсветка монитора горит слишком ярко, вы меняете яркость. А что же происходит в этот момент на самом деле?
Представим себе, что подсветка монитора это несколько светодиодов. Питается все это дело от постоянного напряжения. Но вот нам понадобилось уменьшить яркость монитора. Логично ответить, что это можно сделать переменным резистором. На маленьких токах — возможно. Но на больших, резистор будет сильно греться. Сильно возрастут габариты, потери, энергопотребление.
Поэтому люди придумали схему на транзисторах, которая делает из постоянного напряжения пульсирующее. Оказывается, пульсирующее напряжение, в зависимости от заполнения периода будет эквивалентно постоянному напряжению. Т.е. если в течение периода напряжение 50% времени было включено, 50% выключено, то эквивалент постоянного напряжения будет равен 50% от номинального.
В цифрах это просто — было 5В постоянного напряжения прогнали через ШИМ — получили 2,5В. Если заполнение импульса равно 75%, то эквивалентное постоянное напряжение будет 3,75В. Думаю идея понятна.

Теперь приступим к практической реализации. Будем при помощи микроконтроллера изменять заполнение от 0 до 100%, потом от 100% до нуля. Конечный результат должен выглядеть так:
Чтобы было более наглядно, подключим светодиод. В результате у нас будет плавно включаться и отключаться светодиод.
Запускаем наш любимый CodeVision. Создаем проект при помощи мастера. В разделе таймеров (Timers), выбираем Timer 2 и выставляем настройки как на рисунке.

Если попробовать сгенерировать проект, то прога может ругнуться. Соглашаемся, ведь у нас нога 3 порта В должна быть настроена как выход.

Приводим код к следующему виду:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | #include |
#include
Уделим внимание строке OCR2=0x00; Эта переменная как раз и отвечает за величину заполнения импульса. Изменяется данная величина от 0 до 255(0хFF), т.е. 255 соответствует 100% -му заполнению (постоянный ток). Следовательно, если нужно 30% заполнение (255/100)*30=77. Далее 77 переводим в шестнадцатеричную систему OCR2=0x4D;
TCCR2=0x6C; Изменяя данную величину мы можем регулировать частоту ШИМ. Величина частоты работы ШИМ кратна частоте, на которой работает микроконтроллер. В проекте использована частота микроконтроллера 8 МГц, частоту ШИМ использовали 125кГц, следовательно делитель равен 8/125=64
0x6C в двоичной системе счисления 1101100, открываем даташит на Atmega8 и видим описание регистра TCCR2, так вот 1101100
последние цифры 100 и отвечают за выбор частоты работы ШИМ
Приступим непосредственно к программе:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 | #include |
#include
Код прост до безобразия: сначала в цикле увеличиваем заполнение от 0 до 255(ff), потом уменьшаем от 255 до 0.
И напоследок видосик, как это все должно работать. Успехов в изучении)
Урок 13
Часть 1
ШИМ. Мигаем светодиодом плавно
Сегодня мы изучим возможность использования широтно-импульсной модуляции в микроконтроллере AVR , или, как говорят в народе, ШИМ .
В технической документации мы будем видеть чаще аббревиатуру PWM или pulse-width modulation , что преводится имено также.
Что же такое вообще широтно-импульсная модуляция.
ШИМ — это управление свечением светодиодов, вращением двигателей, и прочими устройствами необычным способом, при котором данное управление осуществляется не приложенным напряжением к контактам, а квадратными импульсами. При этом напряжение будет только двух видов — высокое (1 ) и низкое (0 ). При данном способе результирующее напряжение вычисляется как среднее по времени между временем высокого состояния в одном импульсе и временем низкого состояния. Мы вычисляем отношение времени (или широты) высокого состояния к общему периоду импульса. Называем мы это скважностью импульса. То есть чем больше в периоде напряжение находилось в высоком состоянии, тем больше скважность, а, следовательно, тем больше и результирующее среднее напряжение. То есть, чтобы найти результирующее напряжение, нам необходимо и достаточно вычисленную скважность умножить на напряжение и разделить на 100, так как скважность как правило измеряется в процентах. Например, если у нас в квадратном импульсе широта логического нуля равна широте логической единицы, то скважность у нас будет 50 процентов, и, если напряжение будет 5 вольт, то среднее результирующее напряжение мы получим равное 2,5 вольт и т.д. Лучшую картину объяснения данной ситуации мы можем увидеть, посмотрев видеоурок, ссылка на который дана в конце данной статьи.
Это конечно очень упрощённое понятие ШИМ. Есть более серьёзные разъяснение данной технологии, но нам для наших экспериментов этого будет вполне достаточно.
То есть, подведя итоги объяснению, мы управляем результирующим напряжением, а также и свечением светодиода, угловой скоростью электродвигателя и прочими значениями за счёт изменения скважности импульсов.
Но всё-таки самое интересное, как же всё-таки всё это организовано в нашем микроконтроллере?
В микроконтроллере AVR широтно-импульсную модуляцию можно организовать как программно , так и аппаратно .
Программная организация ШИМ — это когда мы включим на определённое время на ножке контроллера логическую единицу, а затем на определённое время — логический ноль и так по циклу. Плюсы данного способа — это то, что мы можем организовать ШИМ на абсолютно любой ножке любого порта контроллера, а минусом — то, что всё это будет связано с немалыми затратами на процессорное время, и возможно даже будет сопряжено с какими-то ошибками, вытекающими из этого.
Поэтому всегда в любой технологии мы стараемся придерживаться всё-таки именно аппаратного способа реализации.
Аппаратная организация ШИМ в МК AVR происходит на уровне таймера 2 .
Как мы помним из предыдущего занятия, таймеров в конкретном нашем микроконтроллере Atmega8 три. И таймеры 0 и 2 являются восьмибитными. Но на уровне 2-го таймера как раз и организована широтно-импульсная модуляция.
Давайте посмотрим вот такую вот картину
Здесь иллюстрируется то, какие мы должны включить биты в регистре TCCR второго таймера, чтобы запустить широтно-импульсную модуляцию.
Биты WGM как раз и включают таймер в резим PWM (ШИМ). С остальными битами разберёмся позже, если это потребуется.
А сейчас, чтобы это всё прочувствовать, нам необходим проект, который мы и создадим сейчас.
Проект создаем таким же образом, как и на прошлых занятиях. Назовём его Test10, создадим и добавим файлы PWM.c и PWM.h, последний автоматически оформится при создании соответствующими директивами прероцессора. А в главном файле Test01.c мы напишем стандартный код
#include «main.h»
//—————————————-
void port_ini ( void )
PORTB =0x00;
DDRB =0x08;
//—————————————-
int main ( void )
Port_ini ();
While (1)
Как мы видим в коде, в порте B мы включили на выход 3 ножку. В распиновке контроллера мы видим, что у данной ножки есть ещё альтернативное обозначение OC2 , которое и означает возможность этой ножки работать непосредственно с ШИМ

Файл main.h мы можем даже подключить с прошлого занятия по LCD и немного исправим код, подключив туда уже новый наш модуль PWM
#ifndef MAIN_H_
#define MAIN_H_
#define F_CPU 8000000UL
#include
#include
#include
#include
#include
#include «PWM.h»
#endif /* MAIN_H_ */
Ну и теперь начнём писать код в новую библиотеку для работы непосредственно с ШИМ — в файл PWM.c.
Там мы также подключим заголовочный файл и создадим каркас функции для работы с ШИМ
#include «PWM.h»
void init_PWM_timer ( void )
{
}
А в заголовочный файл нашей библиотеки мы добавим прототип данной функции, а также подключим библиотеку для работы с прерываниями
#ifndef PWM_H_
#define PWM_H_
#include
void init_PWM_timer ( void );
#endif /* PWM_H_ */
И вызовем сразу эту функцию в main()
port_ini ();
init_PWM_timer ();
Начнём теперь писать код непосредственно в функцию. Сначала запишем все нули в регистр ASSR , который существует у таймера, но мы его никак не используем
void init_PWM_timer ( void )
ASSR =0x00;
Дальше уже займёмся управляющим регистром нашего таймера. Назначение битов WGM и то, какие именно из них мы включим, мы разобрали. Теперь биты COM20 и COM21, отвечающие за режим самого ШИМ. Мы выберем вот такой режим и соответственно ему и включим данные биты

А включим мы режим, при котором при начале счёта напряжение на ножке OC2 будет находиться в высоком логическом состоянии, а как только мы досчитаем до определённой цифры, то ножка перейдёт в низкое состояние и будет в нём находиться до окончания счёта. И так по кругу.
И останется нам только настроить делитель. Слишком большая частота нам не нужна. Но когда была слишком маленькая, также было заметно мерцание, поэтому давайте включим следующую величину

Поэтому мы включим все три бита.
В итоге значение регистра станет вот таким
ASSR =0x00;
TCCR2 =0b01101110; //Fast PWM, Clear OC2 on Compare Match, clkT2S/256 (From prescaler) (реальная частота получится 8мгц/256 = 31250 гц)
Теперь попробуем собрать проект. Проект нормально собрался. В следующей части мы продолжим работать с ШИМ.
Смотреть ВИДЕОУРОК (нажмите на картинку)

Post Views: 9 484